

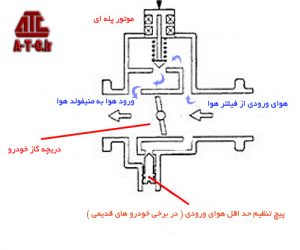
موتور پله ای چیست ؟
موتور پله ای یک موتور الکتریکی هست که حرکت آن کاملا دقیق و از پیش تعریف شده می باشد که ورودی الکتریکی دیجیتال را به یک حرکت مکانیکی تبدیل می کند و با ارسال بیتهای ۰,۱ به سیم پیچهای آن ٬می توان آنرا حرکت داد. در واقع یک موتور پله ای ترکیبی از یک موتور الکتریکی DC و یک سلونویید است. موتورهای پله ای ساده توسط بخشی از یک سیستم دنده ای در حالت های موقعیتی معین قرار می گیرند، اما موتورهای پله ای نسبتا کنترل شده، می توانند بسیار آرام بچرخند. موتورهای پله ای کنترل شده با کامپیوتر یکی از فرمهای سیستم های تنظیم موقعیت هستند، بویژه وقتی که بخشی از یک سیستم دیجیتال دارای کنترل فرمان بار باشند. این موتورها به صورت درجه ای دوران می کنند و با درجه های مختلف در بازار موجود هستند.
در واقع واژه پله به معنی چرخش به اندازه درجه تعریف شده موتور است. مثلا استپ موتوری با درجه ۱.۸ باید ۲۰۰ پله انجام بدهد تا ۳۶۰ درجه یا یک دور کامل بچرخد (۱.۸X۲۰۰ = ۳۶۰ ) و یک استپ با درجه ۱۵ فقط باید ۲۴ پله برای یک دور کامل انجام بدهد (۲۴ X۱۵ =۳۶۰ ) . این ویژگی فوائد بسیار زیادی دارد از جمله امکان کنترل سرعت.
ساختار موتور پله ای
این موتور عموما دارای چهار قطب میباشد که سیم پیچها بر روی این چهار قطب قرار می گیرند و شما با ارسال بیتهای ۰و۱به این سیم پیچها در واقع میدان مغناطیسی ایجاد می کنید که این میدان باعث حرکت روتورمغناطیسی موجود در داخل موتور پله ای می شود. البته میبایست این سیم پیچها را به توالی ۰ و ۱ کرد و گرنه موتور مطابق میل شما نخواهد چرخید. یکی از مشخصه های این موتور زاویه حرکت آن می باشد و هر موتوری زاویه حرکتی مخصوص به خودش را دارد. مثلا اگر موتوری زاویه حرکتش ۷درجه باشد٬ این موتور در هر بار ی که سیم پیچهایش حاوی ولتاژ می شوند٬ ۷ درجه در سمت حرکت عقربه های ساعت یا خلاف جهت آن بسته – به اینکه سیم پیچها با چه ترتیبی ولتاژ دار می شوند- خو اهد چرخید. این ۷ درجه چرخش برای این موتور پله ای نمونه یک پله یا یک step محسوب می شود . پس یک موتور پله ای در یک دور کامل ممکن است.،۱۰۰تا ۲۰۰ پله کمتر یا بیشتر بسته به نوع موتور داشته باشد . شما حتی می توانید یک موتور پله ای را به صورت نیم پله یعنی با نصف زاویه حرکت راه اندازی کنید . این موتورها به صورت میکرو پله نیز حرکت می کنند . در واقع منظور ٬ حرکت خیلی ریز ودقیق است. وقتیکه شما یک موتور پله ای را از نزدیک می بینید متوجه تعدادی سیم رنگی می شوید که از موتور پله ای بیرون آمده در واقع این سیم ها هر کدام به سر یک سیم پیج متصل هستند و یک سیم بین تمام سیم ها مشترک است.
نحوه کنترل
این موتور به صورت ۱ بیتی یا دو بیتی حرکت می کند. در حالت یک بیتی در هر لحظه تنها یک سیم پیچ پالس ۱ را دریافت می کند ودر حالت دو بیتی دو سیم پیچ در هر لحظه پالس ۱ را دریا فت می کنند. اگر این دریافت پالس به صورت منظم و پشت سر هم انجام شو د٬ موتور نیز به صورت صحیح به سمت جهت حرکت عقربه های ساعت یا خلاف جهت آن حرکت خواهد کرد.
حال نحو ه کنترل موتور پله ای را در دو حالت یک بیتی یا دو بیتی بررسی می کنیم .
نحوه کنترل ۱ بیتی
در حالت یک بیتی اگر اول سیم پیچ ۱ را تحریک کنیم ٬ باید سیم پیچ ۲ و۳ و۴ بدون تحریک باشند . جهت حرکت موتور پله ای در جهت حرکت عقربه های ساعت است . بعد از سیم پیچ ۱ نوبت سیم پیچ ۲ است که تحریک شود.، و در این حالت نیز بقیه سیم پیچها بدون تحریک هستند. بعد از آن نوبت سیم پیچ ۳ و سپس نوبت سیم پیچ شماره ۴ است . دقت کنید که در هر لحظه یک سیم پیچ تحریک شود ٬اگر بعد از سیم پیچ ۱ سیم پیچ ۴ را تحریک کنیم و سپس به سراغ ۳و۲ برویم موتور در جهت عکس عقربه های ساعت خواهد چرخید.
نحوه کنترل ۲ بیتی
در حالت دو بیتی در لحظه دو سیم پیچ باردار می شوند . مثلا اگر اول سیم پیچ ۱ و۲ تحریک شوند ٬بعد سیم پیچ ۲و۳ ٬ سپس ۳و۴ و در نهایت ۴ و ۱ .برای حرکت موتور پله ای بایست همین ترتیب را تا وقتیکه می خوا هید موتور حرکت داشته باشد ادامه دهید . حال اگر این ترتیب را عوض کنید موتور در خلاف جهت فعلی حرکت می کند .
نحوه حرکت موتورهای الکتریکی
حالا ببینیم چه اتفاق می افتد که موتور پله ای حرکت می کند.
کلید فهمیدن اینکه موتورهای الکتریکی چگونه کار می کنند ٬فهمیدن نحوه عملکرد آهنربای الکتریکی است . آهن ربای الکتریکی مبنای کار موتورهای الکتریکی است.
اگر سیمی حدود ۱۰ سانتی متر بردارید و به دور میخی بپیچید و دو سر آنرا به دو سر یک باطری وصل کنید٬ زمانیکه جریان از سیم عبور می کند یک میدان مغناطیسی در اطراف سیم ایجاد می شود و آن میخ تبدیل به آهنربا می شود . این میدان تا زمانی که جریان از سیم عبور میکند وجود دارد . یعنی تا زمانی که دو سر سیم به باطری متصل باشد و زمانی که این اتصال قطع شود٬ این میدان نیز از بین می رود . آن سر میخ که به قطب مثبت باطری وصل شدهS وسر دیگر را که به قطب منفی باطری وصل شده N می نامیم. حال اگر یک آهن ربای نعلی شکل بردارید و این میخ را به صورت معلق در وسط این آهنربا قرار دهید به طوری که میخ کاملا افقی قرار گیرد . در صورتیکه قطب N میخ در مقابل قطب N آهنربا ی نعلی شکل قرار بگیرد و قطب دیگر میخ نیز به همین صورت . در این وضعیت میخ ۱۸۰ درجه خواهد چرخد تا قطب N میخ در مقابل قطب S آهنربا و قطب S میخ در مقابل قطب N آهنربا قرار بگیرد . همانطور که میدانید دو قطب متضاد همدیگر را جذب و دو قطب همسان همدیگر را دفع می کنند ٬ که حرکت میخ نیز در آهنربای نعلی شکل به همین صورت است .
حرکت موتورهای الکتریکی نیز در واقع از همین قانون پیروی می کند . ما هر بار که در یک موتور پله ای یک سیم پیچ را تحریک می کنیم در واقع قطبهای N , S را در داخل موتور ایجاد می کنیم و روتور نیز مثل آن میخ و با استفاده از قانون جذب ودفع قطبها به حرکت در می آید واین حرکت همان چیزی است که ما به صورت فیزیکی از موتور مشاهده می کنیم
. مقایسه بین سرو موتور و موتور پله ایی ( Servo motor و Stepper motor )
سروو موتور یک سیستم کنترل بسته ( Close loop ) است در حالی که Stepper motor یک سیستم حلقه باز است ( open loop ) یعنی سیستم بدون فید بک ، بنابر این احتمال خطا در آن زیاد است ولی در سروو موتور مدارات فید بک بکار رفته در آن تشکیل یک سیستم حلقه بسته می دهد . فید بک سروو موتور یک انکدر نوری است که محور آن به سقف موتور کوبل شده است . هر انکدر در ازای دوری مشخص قطار پالس تولید می کند برای مثال یک انکدر ۲۵۰۰ پالس در ازای گردش یک دور محور آن پالس۲۵۰۰ تولید می کند که درایو سروو موتور این پالس را دریافت می کند و شمارش تعداد آن موقعیت محوری موتور را تشخیص می دهد
عدم وجود انکدر در موتور پله اییStepper motor باعث می شود که کنترل خط به سیم فرمان بدهد و درک عینی از موقعیت محوری موتور نداشته باشد . امروزه در اکثر سیستم های خطی استفاده ازسروو موتور به جای موتور پله اییStepper motor رایج تر شده و کاربرد بیشتری دارد
آیا تا کنون به واژه motion (حرکت) فکر کرده اید. امروزه اهمیت جابه جایی در کلیه زمینه ها احساس می شود. حرکت و سرعت تعریف جدیدی را از جهان امروز ارائه می دهد.
کنترل حرکتی در حوزه الکترونیک به معنی کنترل صحیح حرکت یک شی بر اساس فاکتور هایی مانند سرعت – مسافت- بارگیری و یا ترکیبی از کلیه موارد می باشد. امروزه سیستم های کنترل حرکتی بسیار زیادی مو جود است که می توان از stteper motors- linear stepper motors- Dc brush-… نام برد. در اینجا به توضیحات مختصری از تکنولوژی step motor ها اکتفا می کنیم.
در تئوری از stepper motor به عنوان یک شگفتی در ساده سازی یاد می شود. اساسا هر stepper یک مو تور با یک میدان مغناطیسی می باشد که خود به صورت الکتریکی رو شن شده و باعث چرخش دایرهای آرماتور آهنربا می شود.
قسمت کنترل کننده حرکت از یک کابل میکرو پروسسور جهت تولید پالس های پله ای و ایجاد سیگنال های مسیر حرکت تشکیل شده است. و هر indexer بایستی قادر به انجام دستورات اجرایی باشد.
motion driver و یا همان آمپلی فایر دستورات سیگنال های رسیده از منبع را به قدرت مورد نیاز برای چرخش پره های مو تور می شود. امروزه تعداد زیادی driver با قدرت های مختلف جریان و ولتاژ در ساختار تکنولوژی یافت می شود.
هر stepper motor یک وسیله مغناطیسی است که هر پالس دیجیتال را به یک چرخش مکانیکی مانند چرخش پره تبدیل می کند. از مزیت های آن به هزینه پایین- امنیت بالا – ساده بودن و قابل استفاده بودن در هر محیط می توان اشاره کرد.
انواع stepper motor ها :
variable reluctance
permanent magnet
hybrid
چگونگی طراحی هر driver تعیین کننده نوع خروجی هر stepper motor است که دارای سه نوع full- half- microstep می باشد.
Full step:
استاندارد طراحی دارای ۵۰ چرخندا دندانه دار و تو لید کننده ۲۰ پالس پله ای برای چرخش مکانیکی هر عنصر است.
Half step:
به معنی آن است که مو تور می تواند دارای ۴۰۰ حرکت پله ای در هر دوره باشد. در این سیستم یک چرخنده خود دارای انرژی ست که باعث چرخش تناوبی دو چرخنده دیگر می شود. half stepping یک راه حل عملی تر در صنعت است.
microstep:
یک تکنولوژی نسبتا جدید است که جریان چرخش هر چرخنده را کنترل می کند. این کنترل در سطحی انجام می شود که تقسیم کننده ای فرئی دور تری در بین قطبها قرار گیرد
جهت جستجو سریع موضوع مقاله ، پرسشنامه ، پاورپوینت و گزارش کارآموزی می توانید از قسمت بالا سمت راست جستجو پیشرفته اقدام نمایید.
همچنین جهت سفارش تایپ ، تبدیل فایل پی دی اف (Pdf) به ورد (Word) ، ساخت پاورپوینت ، ویرایش پایان نامه و مقاله با ما در تماس باشید.




ارسال نظر